TECH
Meet the robot that anyone can build
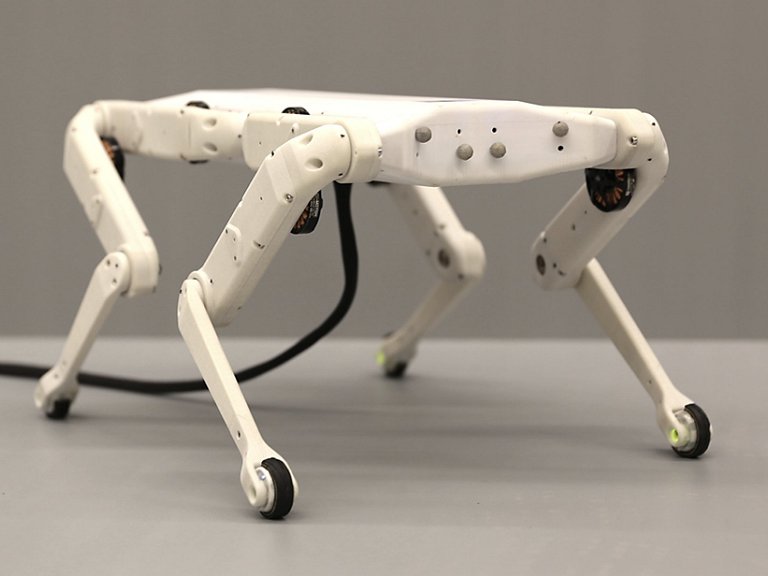
Open Source Robot
Engineers from the universities of Tubingen and Stuttgart, Germany, launched the free, open-source project of a four-legged robot that walks and jumps imitating a dog's biomechanics.
It is a type of equipment that is much required in research, but typically very expensive.
"The project aims to provide robotic research labs around the world with an easy-to-assemble legless robot kit that will not bankrupt anyone," say Felix Grimminger and his colleagues.
The Solo 8 robot body can be entirely manufactured on a 3D printer, while the drive and electronic components are all commercially available.
"Solo has some new features that we are interested in exploring in the future," said Grimminger. "He has a wide range of movements. When the robot falls on its back, it can set its legs to the other side and simply stand up. Or it can jump to reach 65 centimeters from a height of 24 cm.
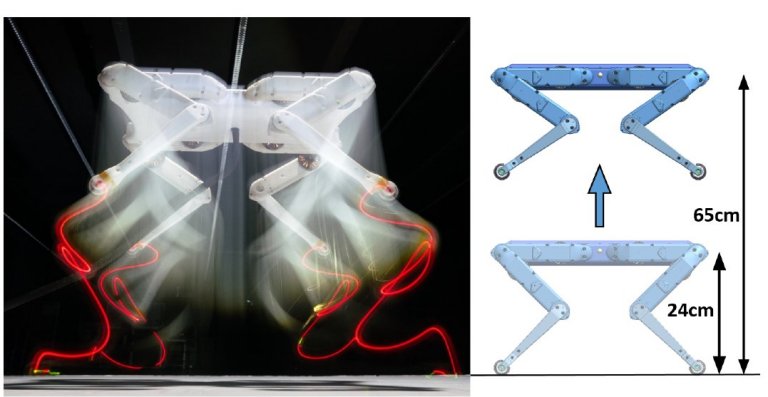
Jumping robot
In addition to walking imitating the movements of dogs, the robot can jump up to 65 cm in height.
These capabilities were possible because the robot emulates a spring-like behavior, that is, its legs act as a recovery structure. Torque-controlled motors mimic the leg muscles of the animals or the elasticity of the tendons.
"Note that the robot uses virtual springs, they are not mechanical springs. And, like virtual springs, they can be programmed. You can, for example, adjust the stiffness of the spring from soft to hard. A variable stiffness is what we see in animals and in humans, and Solo is able to adjust its stiffness as much as possible. That way, the robot achieves adaptive and robust locomotion behavior, "said team member Alexander Sprowitz.
The team hopes that the availability of the open source robot will form an international research community that can exchange control algorithms and compare their implementation techniques, since the hardware will be the same.
All information for the construction of Solo 8 was made available on the GitHub platform under the BSD-3 license. The address is https://github.com/open-dynamic-robot-initiative.




No comments:
Post a Comment